ESP32-P4 智能视觉终端
准备学校嵌入式系统比赛的项目。当前版本 v1.3-tools。仓库 github.com/Hooper18/esp32p4_competition。
干了什么
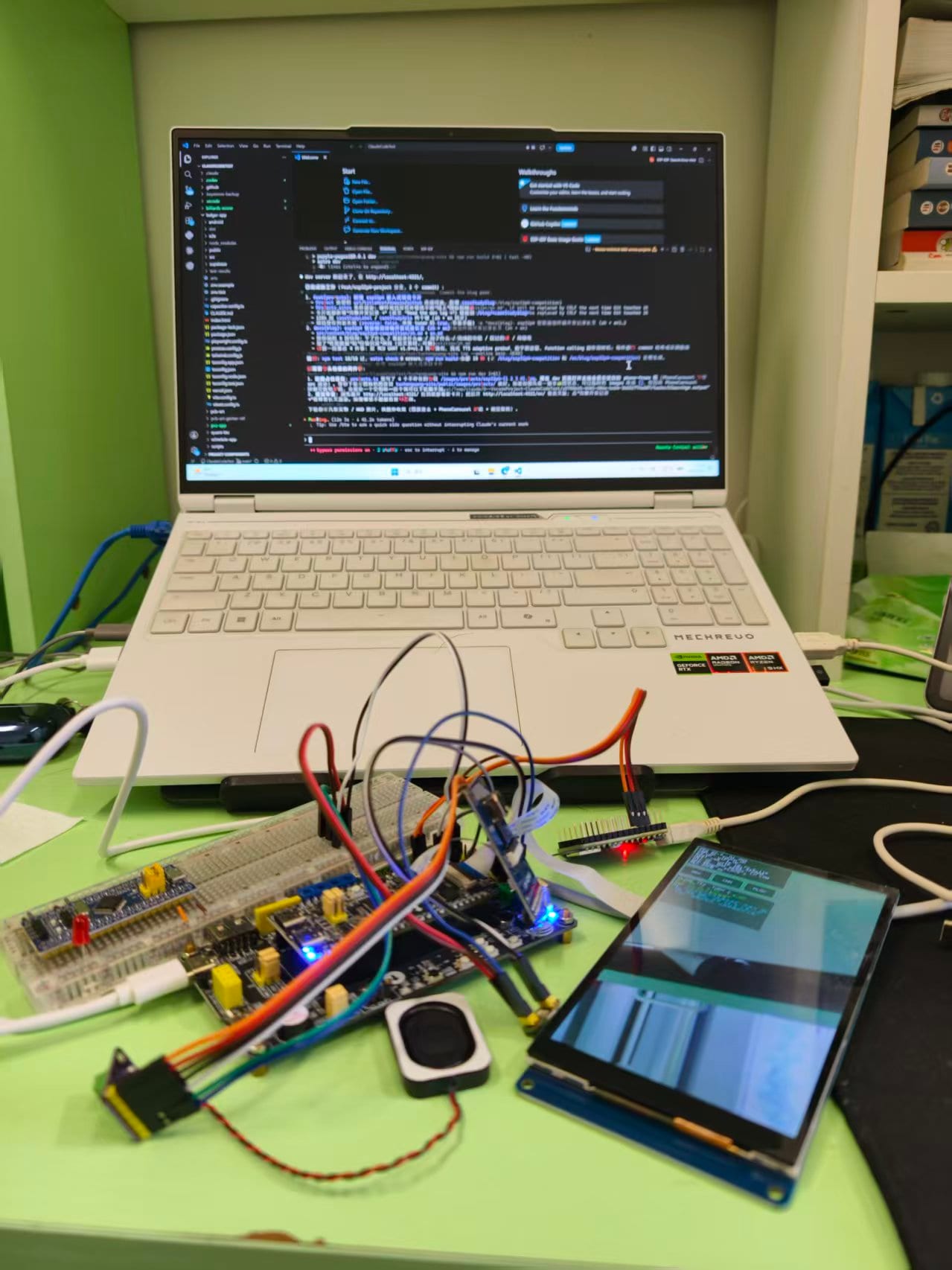
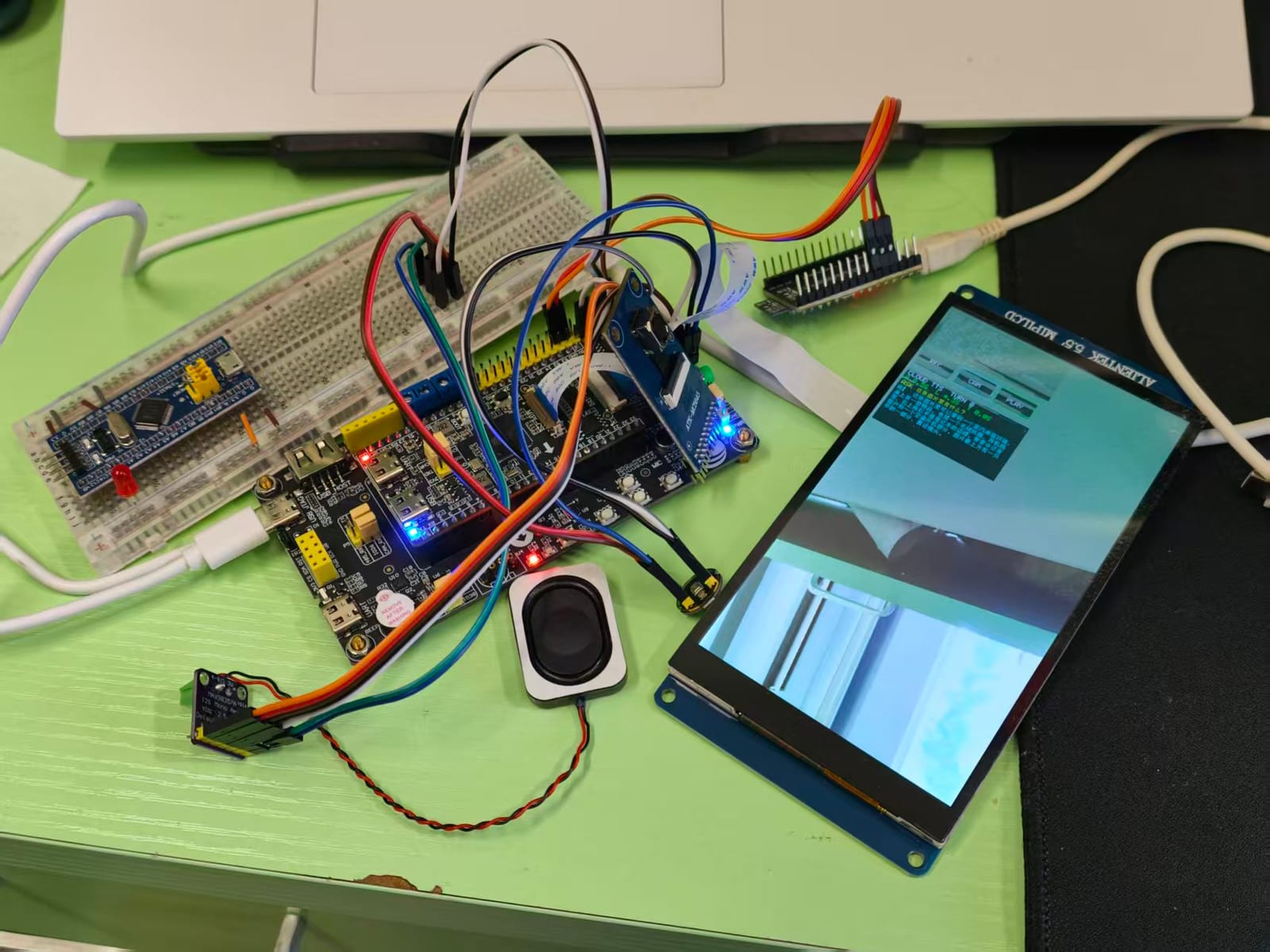
DNESP32P4 开发板(ESP32-P4 主控)+ ESP32-C3 协处理器构成的双 MCU 智能交互终端。P4 负责本地视觉、显示、触摸、音频、HUD;C3 隔离整个网络栈,专跑 Wi-Fi 和 HTTPS。两者通过 UART1(115200 8N1)连接,承载语音对话、视觉问答和工具调用的全部上下行数据。
效果
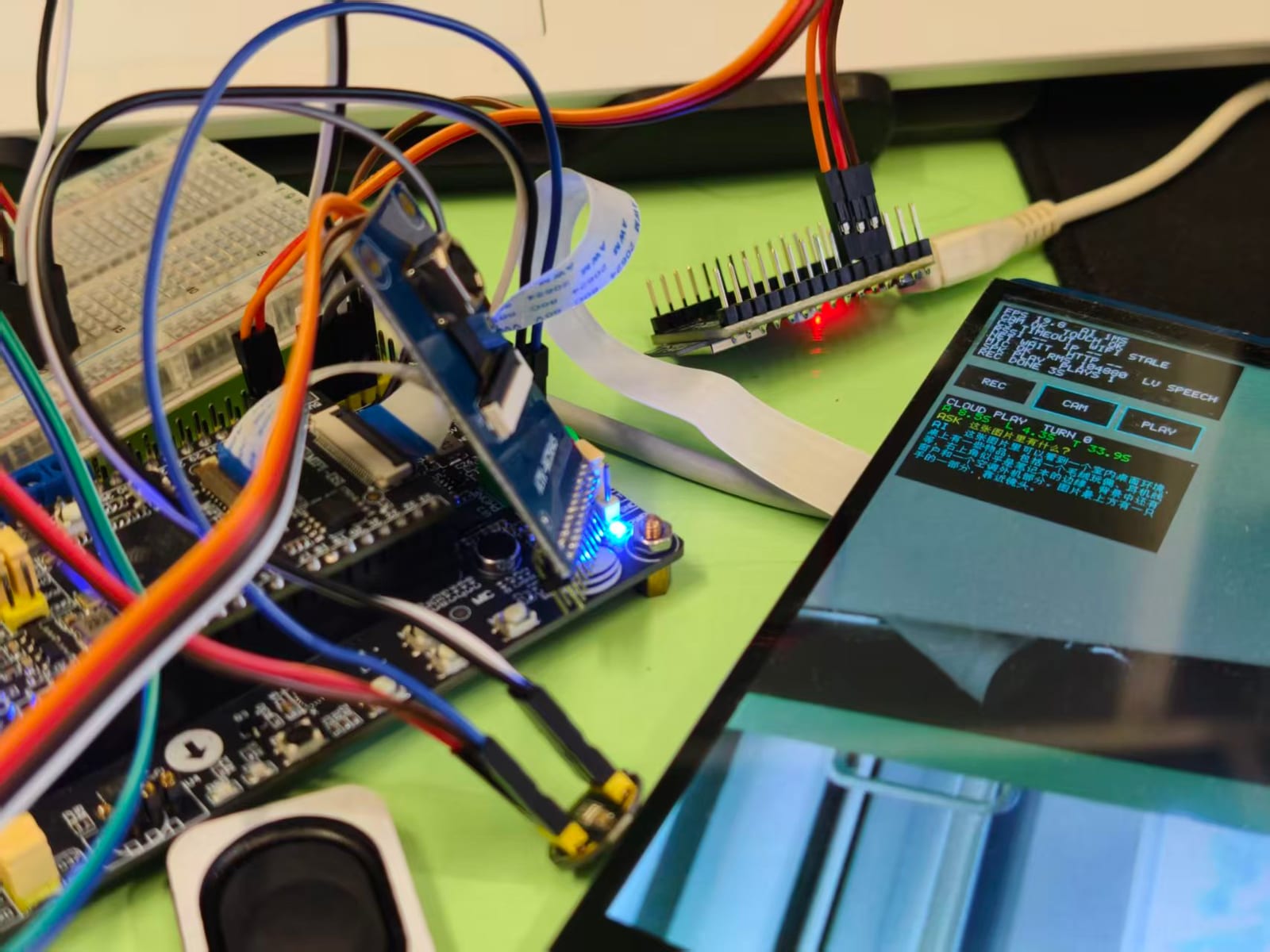
5.5 寸 720×1280 MIPI LCD 上同时显示摄像头预览和 RGB565 HUD 叠加。稳定状态:
FPS 30.0 AI 1MS
CAM OK TOUCH OK
C3 OK WIFI OK
RSSI -52 IP 192.168.x.x
NET OK HTTP 204 320MS
mic LVL 3 SPEECH
ASR 7.5s · LLM 5.5s · TTS 5.1s
[REC] [CAM] [STOP]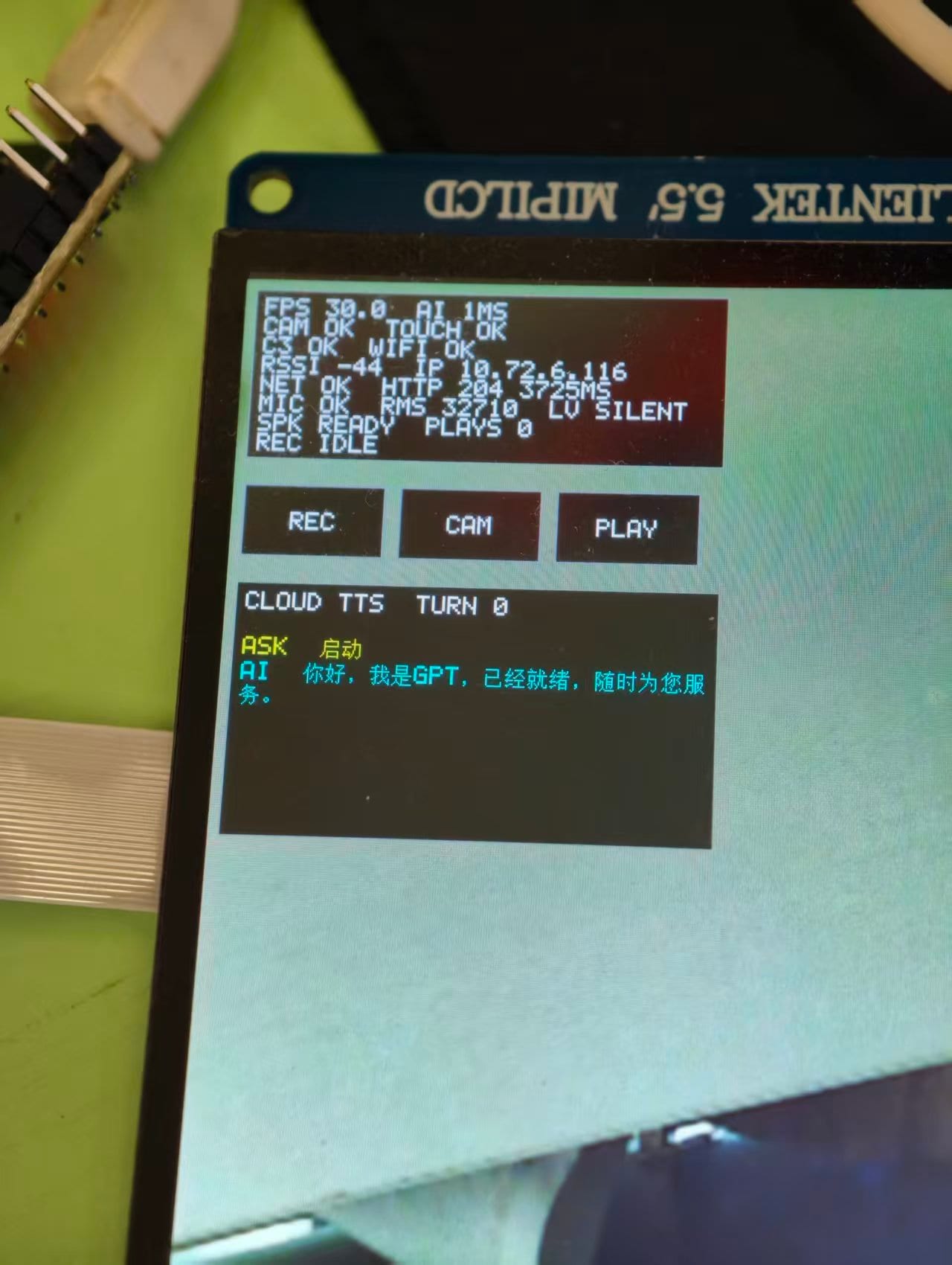
实际对话样例:
- 问”现在北京几点” → 喇叭回答”北京时间 14 点 32 分”
- 说”5 秒后哔一下” → TTS 播完”已设置”,5 秒到时哔三声
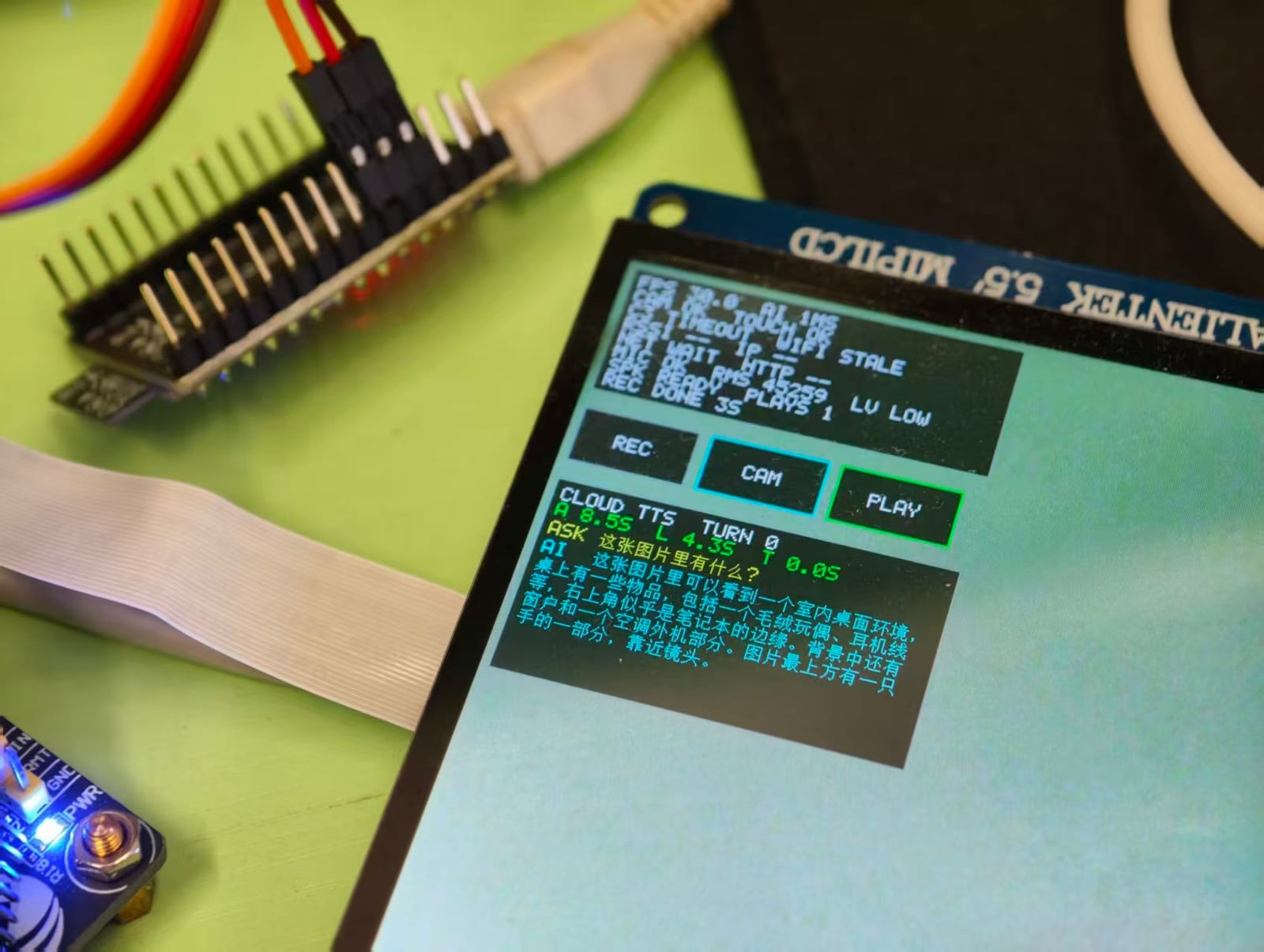
- 说”看一眼帮我描述一下” → GPT 自动 call
take_photo拍照上传再回答
端到端延迟典型 30 秒(无 tool)/ 40 秒(有 tool)。
用了什么
硬件
- 主控:正点原子 DNESP32P4(ESP32-P4 RISC-V 400MHz + PSRAM + MIPI 显示/摄像头硬件加速)
- 协处理器:ESP32-C3-DevKitM-1-N4X
- 显示:5.5″ MIPI DSI LCD 720×1280
- 触摸:GT911 I2C
- 摄像头:OV5645 MIPI CSI 1280×960 RGB565
- 麦克风:INMP441 数字 I2S
- 功放:MAX98357A 数字 I2S
- 互联:P4 ↔ C3 UART1,GPIO28/29 ↔ GPIO5/4,115200 起步后升 460800
软件栈:ESP-IDF v5.5.4 / C/C++ / FreeRTOS / LVGL v9 + esp_lvgl_port / minimp3 / cJSON / PPA framebuffer 硬件加速 / esp_jpeg_enc / OpenAI Whisper · GPT-4o · TTS / Open-Meteo Weather。
双 MCU 分工:ESP32-P4 性能强但没有 Wi-Fi/BT 射频,所以让 C3 隔离整个网络栈。这样 P4 专注实时音视频(30fps 预览 + I2S 全双工 + LVGL UI + AI 推理调度)不被网络中断打断;C3 隔离 TLS 握手、cert 验证、HTTP 上下行,P4 只看到简洁的 base64 字节流。代价是要自己设计可靠的双 MCU 通信协议——这成为项目最大的技术挑战。
达到了什么功能
输入
- 语音录音:REC 按一下开始、再按停;或本地 VAD 检测 1.5 s 静音自动停
- 图像捕获:CAM 按一下抓帧;可与 REC 同按实现”看着说”
- 触摸:GT911 全屏 + HUD 三个虚拟按钮(REC / CAM / PLAY)
云端处理流程
- VAD 上传裁剪:典型 5 s 录音体积减 30-50%
- ASR:OpenAI Whisper-1
- LLM:OpenAI gpt-4o-2024-11-20,含人格化 system prompt + 最近 3 轮历史 + 当前北京时间 + function calling
- TTS:OpenAI gpt-4o-mini-tts,coral 音色,MP3 流式输出。数字 / ℃ / % 走文本预处理再合成
Function calling 工具集(7 个)
本地工具:
get_ambient_sound_level— 当前环境音量等级get_device_status— Wi-Fi RSSI / uptime / free heaptake_photo— 触发拍照play_beep(freq, duration)— 提示音
网络工具:
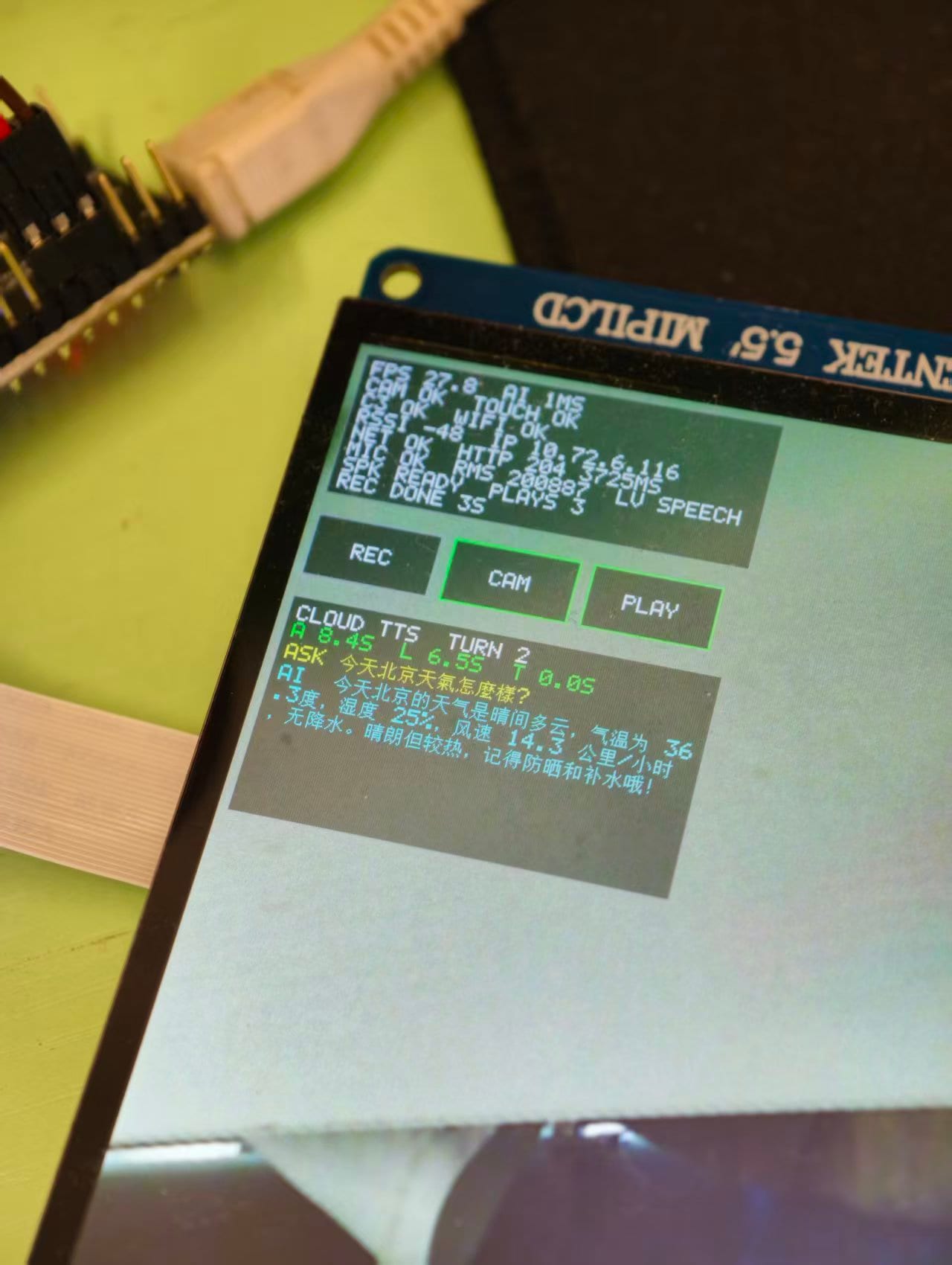
get_time— 当前北京时间(C3 NTP 同步)set_timer(seconds)— 一次性定时器,延后到 TTS 播完才启动get_weather(lat, lon)— Open-Meteo 任意经纬度天气
多轮调用循环最多 3 轮,最后一轮强制不带 tools 让 GPT 收尾给文本。
输出
- I2S 流式 TTS 播放(边下边解码边播)
- MIPI DSI 720×1280 LCD:摄像头预览 + RGB565 HUD 叠加
HUD 实时显示:C3 链路、Wi-Fi、HTTP 状态、麦克风 RMS、喇叭播放、录音进度、当前 cloud pipeline 状态、各阶段耗时、对话区滚动 5 行、按钮颜色随状态切换(绿=可点 / 灰=忙 / 红=录音 / 青=播放)。
遇到了什么问题 / 怎么解决
UART 链路稳定性
朴素文本协议起步:每帧一行 base64,HTTP_POST_DATA <b64>\n。任何 1 bit flip 整帧 abort。
baud 升级过程:115200 太慢(对话 ~100 s)→ 升 230400 / 460800 / 921600 都偶发位翻转 → 回到 115200 牺牲速度换稳定。根因:杜邦线无屏蔽无流控,115200 以上必然偶发 bit flip。
最后用协议 v2:每帧 seq=NN crc=XXXX,CRC16-LE 用 ROM 里的 esp_rom_crc16_le,stop-and-wait 等 ACK 才发下一帧,NAK / timeout 重传最多 3 次。
v1.0 上线后立刻死锁:摄像头花屏 + 按键无响应。诊断:ACK timeout 200 ms 在上传路径完全不够;C3 端 esp_http_client_write 因 TCP backpressure 可阻塞 >1 s,延迟到的 ACK 污染下次 HEALTH 心跳通道。v1.2 修两处:ACK timeout 改 2000 ms 覆盖 TCP backpressure 最坏情况;retry 耗尽后 uart_flush_input 清残留 ACK 阻断污染路径。
结果:上行 0% CRC 错、下行 1.3%(全部 NAK 重传成功)、链路 0 死锁、ASR 时间 14 s → 7.5 s。
流式 TTS 播放
OpenAI TTS 返回 MP3 流,需要边下边解码边播。直接喂 minimp3 失败:layer-III bit reservoir 需要跨帧字节连续,UART chunk 边界打断,第一帧后 153 次 skip。全缓冲又得等十几秒才开声。
最终方案:双任务 + 自适应预缓冲。UART chunk callback 只追加写 PSRAM accumulator;独立 decoder 任务从 accumulator 拉数据用 minimp3 解码 → PCM 推 stream ring → player drain 到 I2S TX。
关键算法:观测下载速率 × content_length 推算”还要下多久”,预缓冲到 prebuf_audio_ms ≥ remaining_download_ms × 0.7 才正式调 audio_service_pcm_stream_start。无论网络快慢都不会 ring underrun。
数字朗读
TTS 模型经常把数字念错:“38640” → “34680”、“532” → “332”、“024” → “0 百 2 十 4”。TTS instructions 无法强制控制读法。
最终用文本层预处理彻底规避:1-99 转自然中文数词(“11” → “十一”),3+ 位逐位(“2026” → “二零二六”),小数点 → “点”,leading-zero 保留位(“01” → “零一”,修了”12:01” 念成”十二点一”丢 0 的 bug),℃/° → “度”,% → “百分”。
Function calling 副作用时机
set_timer(seconds) 第一次实现:用户说”5 秒后哔一下”,结果先听到哔再听到 GPT 说”已设置”。
根因:tool 同步执行立刻 esp_timer_start_once(5_s),但还要走 GPT round 2(5-10 s)+ TTS 下载播放(15 s),定时器在 TTS 没开始就已触发。
修复:tool 不直接启动 esp_timer,而是把 seconds 存到静态变量;cloud_pipeline_task 完成 TTS 播放后才调用 cloud_pipeline_fire_deferred_timer()。turn 开始时 reset 避免上一轮失败 timer 泄露到下一轮。
局限性
- AI 仍是 dummy inference / skeleton:HUD 上的 “AI 1MS” 只是展示本地推理调度框架,没接真实模型。比赛现场的本地 AI 能力还要补
- 完全依赖云端 LLM:没网就废一半功能;OpenAI / Groq 偶发慢响应(GPT POST 30+ s)、地区不稳、quota 限制都是现实问题
- 端到端 30-40 s 不算快:瓶颈在 ASR 上传和 TTS 下载,下一步想试 Opus 编码音频(WAV 100 KB → 10-15 KB)+ GPT-4o SSE 流式响应
- UART 物理层仍有 1.3% 下行 CRC 错:靠重传兜底,物理层本身不算稳定
- 除 OpenAI / Open-Meteo 外没接其他云 API:现场演示其他云服务还得加
更细节的开发记录在仓库 00_docs/DEVELOPMENT_JOURNEY.md,每个 commit 的 trace、错码、提速倍率都在里面。